與奔馳定速巡航失控實在蹊蹺不同,本次事件疑點并不算太多。關于事故細節,隨著時間的推移已經逐漸明晰,總結下來有以下幾點:
? 事故發生地點
美國亞利桑那州,一條車流量不大的四車道公路上;
? 事發時間和環境
當地時間周日晚十點左右,該時段無風、無雨、光線昏暗;
? 事故過程
Elaine Herzberg(49歲)騎(推)自行車在由西向東橫穿馬路時,被一輛由南向北的Uber自動駕駛汽車撞倒,因為傷勢過重,經送往醫院搶救無效死亡。

▲事故發生地點
? 事故細節
1)Elaine Herzberg違反交通規則橫穿馬路,人行道在距離事發點一百米左右;
2)撞擊時,Uber車速為61km/h,此路段限速56km/h,嚴格來說屬于超速駕駛;
3)撞擊處為騎行者膝蓋處到自行車前剎之間,現場未見明顯的剎車痕跡;
4)事故車輛主駕上有一名司機,但事后他強調他是直到Elaine Herzberg被撞倒后,才意識到發生了車禍,此過程中車輛未做任何反應(包括必要的報警提示)。

▲從上圖看,1.XC90未見有明顯剎車痕跡,輪胎未偏轉,說明是徑直碰撞;2.從自行車損壞方向看,確實是受到了側向撞擊。
據當地警察局發言人Josie Montenegro描述,在自動駕駛模式下的Uber車輛并沒有出現故障和技術失誤,并強調:在觀看過車載錄像之后,我們發現無論處于哪種模式(自動駕駛模式以及人類駕駛模式),本次碰撞都難以避免,因為受害人是從暗處突然闖入機動車道的。
不過警方尚未公布事故發生時的車載視頻,對此觀點車聚君保留意見。
車禍發生后,Uber立即停止了在鳳凰城、匹茲堡、舊金山和多倫多的無人駕駛測試,沒有斷言自己無過錯,稱會與當地執法部門合作,以了解事故的真相。而關于本起事故的“當事人”,這輛XC90自動駕駛汽車,卻沒有提及更多。
1這輛沃爾沃XC90到底和沃爾沃什么關系
據外媒USNEWS發布的消息稱,沃爾沃確認了該事故中的SUV是該品牌旗下的XC90型號,不過Uber使用的是其專門用于自動駕駛測試的版本。沃爾沃發言人Russell Datz表示這一自動駕駛技術并不是由沃爾沃開發的。

為此,車聚君咨詢了業內某相關資深人士,他的回答佐證了這一聲明:
這個是沃爾沃為Uber專門生產的自動駕駛測試版本,傳感器、決策和控制器都是Uber設計和指定的,可以說與一般的XC90完全不一樣,只是借用其平臺。類似國內多數自動駕駛車使用林肯MKZ一樣。
2激進派的Uber真的沒錯?
從事件本身來看,這是一起應該“冷處理”的自動駕駛的事件,畢竟這種情況下,連普通車輛都可能難以避免事故。因為事故的“當事人”是自動駕駛就口誅筆伐,未免對萌芽階段的自動駕駛太過無情。

但去年Uber無人駕駛版XC90“翻車事件”還歷歷在目,雖然當時確實是因為其他車輛違規駕駛導致,但不得不承認,自動駕駛汽車無法像人一樣快速應對。
更重要的,事故車并沒有按道路要求限速行駛,這不禁讓人懷疑Uber的自動駕駛技術對道路信息的把控和積累是否充足。
按理說,合格的自動駕駛汽車,至少是能按道路指示要求行駛的。61km/h車速雖然超速不多,按國內標準看,也符合10%的偏差范圍內,但如果電腦不能做得比人精準,我們還要電腦干嘛?
事實上這并不是個例,16年底,Uber自動駕駛汽車就在舊金山測試時闖了紅燈,雖然當時天氣狀況良好,陽光柔和,但測試車竟然毫無停留的徑直沖了過去。
后來根據兩位Uber員工的說法以及一些內部文件反映,那次闖紅燈事件完全是因為引導車輛的地圖程序出了問題,并且,其在6個紅綠燈路口都出現了bug,沒有能夠正確識別交通信號。

那是不是有可能,本次事件也和此有關呢?車聚君在這里僅是做一種假設:如果車速在50km/h或者更低,可能即便撞到人,也不至于出現如此嚴重的事故。
識別地理信息的問題我們暫且討論到這里,我們再來聊聊更關鍵的疑問——為什么測試車沒有反應?
就硬件技術來說,Uber這款無人車還是相當扎實的,配備了激光雷達、攝像頭、GPS等一系列傳感器和中央計算機。事故發生時,除了環境較昏暗外,天氣狀況還是較良好的,按理說不會出現如此重大失誤。

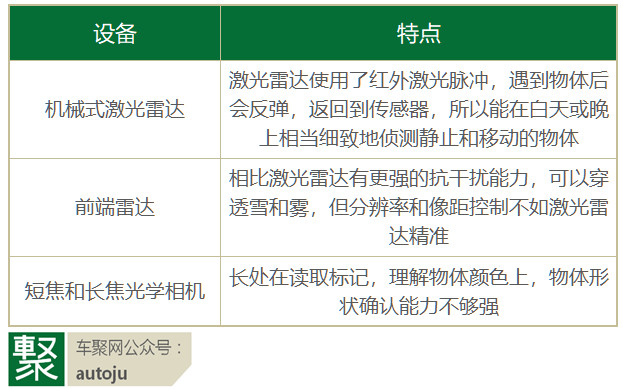
當然我們可以說,比如攝像頭這樣的感知設備在夜間可能存在失誤漏判的情況,假設Elaine Herzberg穿的是一件與環境相近的黑色衣服,那情況就更糟糕了。
但這說服不了車聚君,為什么前端雷達和激光雷達都未探測到推著自行車的行人。如果說當時Elaine Herzberg是突然從路邊竄入道路中,系統沒來得及反應我們能接受,但事實上在事發前Elaine Herzberg一直是處在道路中的,而這塊區域本就是測試車應該高度關注的區域。這不禁讓人擔心起Uber自動駕駛的可靠程度了。

▲案事發前Elaine Herzberg一共走過了3個車道,直到第四個車道才被撞倒(總行程約11米),按正常人走路的速度推算(1m/s),Elaine Herzberg在車道中大約待了11秒鐘,這么長的一段時間,測試車竟然無動于衷。
關于如何評價自動駕駛的可靠程度,此前車聚發表過【自動駕駛《脫離報告》: Waymo和通用稱王稱霸,奔馳墊底|聚聞】,有興趣的同學可以再細讀下。
根據Uber的內部文件,在2017年2月1日到3月8日,這36天里共有43輛車進行了路測,報告顯示平均每行駛1.29公里就需要輔助司機接手一次。
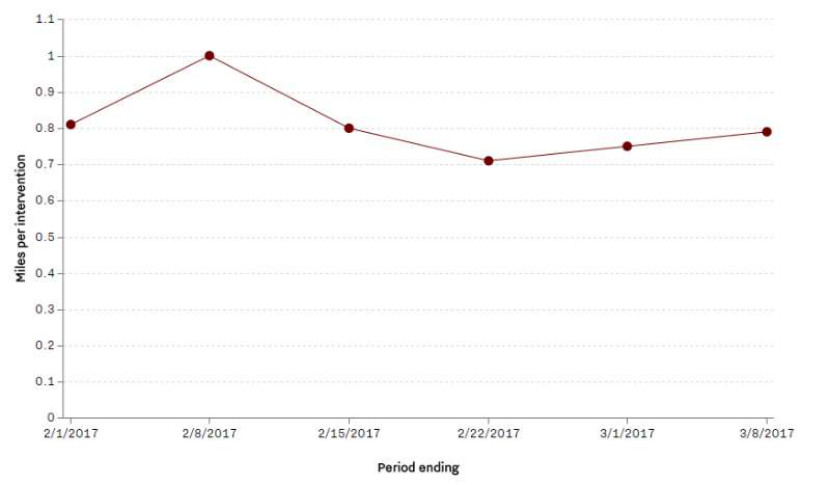
雖然此前脫離報告統計地點是加利福尼亞州,可能與Uber的內部文件顯示的測試地點有一定出入,但仍具備一定參考性。
可以看到,Uber在其中的表現倒數,不及奔馳,而與有著千絲萬縷的老冤家Waymo相比,那簡直就是被碾壓,要知道后者每9006公里才發生一次人工干預。
不能否認Uber在近些年對自動駕駛進行了積極投入,但總感覺有些心急和心存投機。
比如“闖紅燈事件”,Uber當時以“測試技術并非完全無人駕駛”為由辯解,未果后,加州將其路測項目下16輛汽車吊銷資格,今年1月一些車輛才剛剛以“繪圖車”的身份重新上路。
此外,更廣為人知的Uber和Waymo專利案就更不用提了,被割肉的Waymo只怕現在正在偷著樂吧。
3國內的自動駕駛環境只怕更惡劣
可以很肯定的說,現在自動駕駛是哪一家企業都不敢怠慢的技術,作為吃瓜群眾的日子不多了。
這不免讓人擔心,國內如此惡劣的交通環境,真的能培養出優秀的自動駕駛企業嗎?碰瓷黨且不說,就各種斗氣車只怕都能把測試車搞懵。

中國目前已經或正在出臺相關路測辦法的城市有上海、北京、重慶、深圳等,但考慮到環境的復雜性,除對測試員有嚴格要求外,對測試時間、測試路段和測試項目都進行了嚴格規定。
雖然本次事件不是發生在國內,但對國內的自動駕駛企業有很大的警示意義。比如為了宣傳產品,故意夸大或誤導產品能力,本來僅是輔助駕駛的說成半自動駕駛,本是半自動駕駛的給說成自動駕駛,這些都大有人在。更有甚者,把ADAS夸大成自動駕駛也不少見。
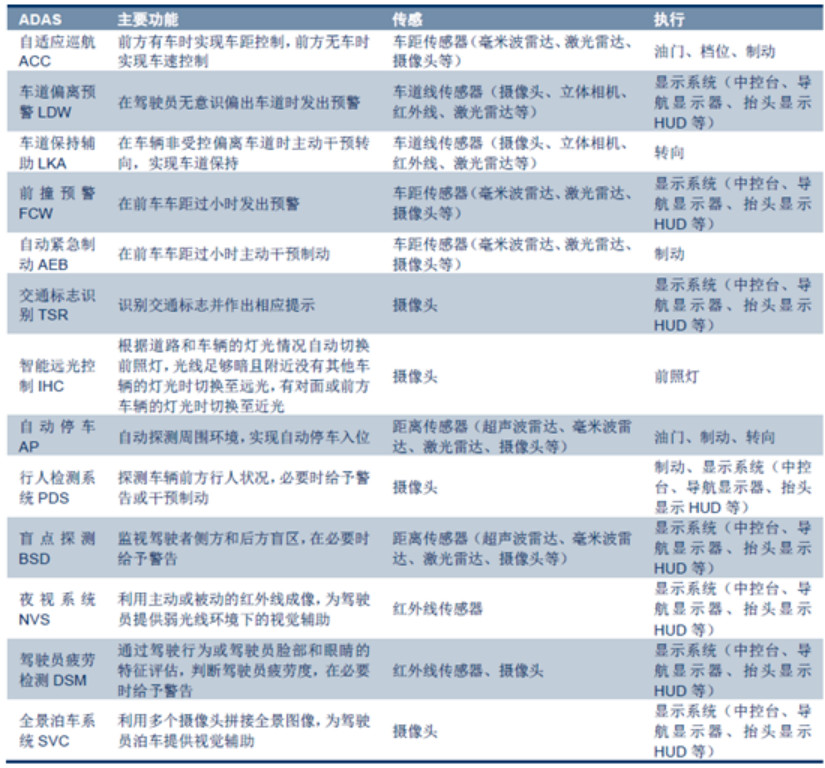
▲ADAS(高級駕駛輔助系統)是利用安裝在車上的各式各樣傳感器,在汽車行駛過程中隨時來感應周圍的環境,收集數據,進行靜態、動態物體的辨識、偵測與追蹤,并結合導航儀地圖數據,進行系統的運算與分析,從而預先讓駕駛者察覺到可能發生的危險,有效增加汽車駕駛的舒適性和安全性。ADAS不等于自動駕駛!
對于企業來說,宣傳不當僅是外在問題,更重要的是,我們的技術積累夠嗎?比如本次事件就不免讓人懷疑,Uber的識別系統中是否有“人推著自行車”這樣的判定模型存在。
典型的例子,比如沃爾沃的袋鼠避讓技術,他們可以通過雷達和攝像頭檢測駕駛途中可能出現的袋鼠,在必要情況下,還會使用自動剎車功能。
車聚小結
可以肯定的是,自動駕駛技術還有太多的未知和亟待解決的問題,雖然Uber犯的錯誤,大家都可能會犯,但為科學買單的“安慰”真的太過冠冕堂皇。我們需要激進派刺激時代的快速進步,我們更需要穩重派輸出更加合理、安全和可靠的技術。
在這里,車聚君引用前美國交通部長安東尼·福克斯(Anthony Foxx)的觀點作為結尾:該起事故是對整個無人駕駛行業和政府的一個警示,應該更加注重技術的安全性。

聲明:
凡文章來源標明“中國智能交通網”的文章版權均為本站所有,請不要一聲不吭地來拿走,轉載請注明出處,違者本網保留追究相關法律責任的權利;所有未標明來源為“中國智能交通網”的轉載文章均不代表本網立場及觀點,“中國智能交通網”不對這些第三方內容或鏈接做出任何保證或承擔任何責任。
征稿:
為了更好的發揮中國智能交通網資訊平臺價值,促進諸位自身發展以及業務拓展,更好地為企業及個人提供服務,中國智能交通網誠征各類稿件,歡迎有實力的企業、機構、研究員、行業分析師投稿。投稿郵箱: itsshenzhen@163.com (查看征稿詳細)








